
A GLOBAL DRONES e sua decisão de desenvolver a própria aeronave
A GLOBAL DRONES, fundada no ano de 2018 na cidade de Florianópolis (SC) (Ref. 1,2 e 3), é hoje o resultado da fusão de duas empresas (YESAERO e GLOBAL DRONES) com objetivo especifico e inicial, de atuar no campo de aeroinspeções utilizando aeronaves remotamente pilotadas (RPAS) e com foco principal em inspeções de linhas de transmissão, prediais, industriais e elaboração de laudos técnicos específicos. Mais recentemente em 2022, a GLOBAL DRONES se prepara para entrar no mercado do Agronegócio.

Um braço importante da GLOBAL DRONES atualmente é o desenvolvimento de Drones nas Classes 3, 2 e até 1, segundo classificação da ANAC, a Agência Nacional de Aviação Civil conforme requisitos RBAC-E 94 EMD 00 (§ E94.5) (Ref 4).
Diversos estudos têm sido feitos com foco em se desenvolver drones especializados para suas respectivas missões as quais vão desde aeroinspeção conforme citado acima, até drones para aplicação no mercado Agro.
Para drones da Classe 2 e 1, estudos de mercado estão sendo iniciados visando uma maior assertividade técnica e econômica do produto futuro com suas respectivas aplicações, principalmente no mercado brasileiro.
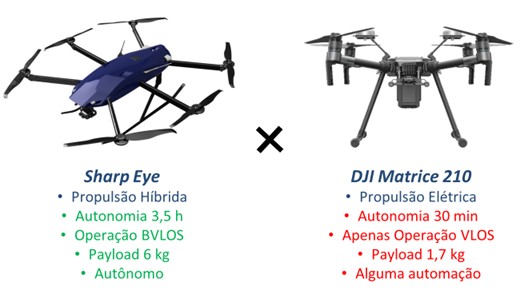
Atualmente, nas inspeções desenvolvidas pela GLOBAL DRONES, o principal sistema empregado já é bastante difundido no mercado a nível mundial e trata-se do modelo Matrice 210 RTK da empresa DJI (Da-Jiang Innovations), mostrado na Figura 2.

A despeito da qualidade do sistema, a GLOBAL DRONES considera que existe um potencial para otimização de suas operações caso fosse utilizado outro sistema com maior autonomia (isto é, voos com maior duração, atualmente impossibilitados pela limitada capacidade das baterias elétricas utilizadas como fonte de energia do sistema) e operação além da linha de visada visual do piloto em comando (BVLOS). A título de exemplo, a combinação entre o ganho de autonomia e a operação BVLOS faria que a produtividade aumentasse, para o caso de inspeção de linhas de transmissão de energia, este aumento seria de 3 torres para 20 torres por voo. Esta diferença se deve principalmente ao aumento de autonomia de voo, a qual vai de cerca de 30min para um drone puramente elétrico para mais de 3 horas para o sistema propulsivo hibrido. Esta maior autonomia associada a não necessidade de paradas para deslocamento entre torres, característica advinda da operação BVLOS, oferece o ganho de produtividade almejado.
Chegou-se assim à proposta de desenvolver um sistema Classe 3, decisão esta tomada com a expectativa de aportar simplificações e reduzir a complexidade no desenvolvimento e no processo de certificação do sistema, ao mesmo tempo em que estabelece o peso máximo de decolagem (MTOW) em 25 quilogramas e não restringe a sua capacidade de transportar a carga paga necessária ao cumprimento das missões definidas nos conceitos de operações propostos.
A figura 4 ilustra a diferença entre a aeronave em desenvolvimento Classe 3, denominada Sharp Eye e o DJI Matrice 210 que é atualmente operado pela GLOBAL DRONES. ‘
Parceria com o IFSC (Instituto Federal de Santa Catarina) e EMPRAPII (Empresa Brasileira de Pesquisa e Inovação Industrial)
Após tomada a decisão de se fazer um novo sistema, a GLOBAL DRONES também decidiu procurar um parceiro acadêmico que pudesse somar valor e competências ao projeto. Além disso, buscava-se financiamento para o projeto.
Nesta busca, a GLOBAL DRONES encontrou no IFSC (Instituto Federal de Santa Catarina) campus Florianópolis e seu polo de inovação EMBRAPII (Empresa Brasileira de Pesquisa e Inovação Industrial) o parceiro ideal. Nesta parceria foi encontrada uma equipe técnica extremamente qualificada composta por professores e alunos da instituição, além do financiamento de parte do projeto pela EMBRAPII.

Atualmente o time do IFSC é composto por oito professores e cada um com seu respectivo bolsista de curso técnico ou de graduação. São professores com competências complementares, cujas áreas de atuação vão desde o Design Industrial até a Engenharia de Telecomunicações, passando por Eletroeletrônica, Ciência da Computação, dentre outros.
O Planejamento do Projeto
Seguindo uma metodologia já consolidada pela EMBRAPII de Estruturação de Projetos (Ref. 5), a qual preconiza a divisão do projeto em Macroentregas, o projeto foi elaborado e dividido em cinco (5) Macros, a saber:
Macro 1 – Uniformizar o conhecimento (2 meses)
Macro 2 – Aquisição e fabricação de peças e partes (6 meses)
Macro 3 – Avaliação dos componentes e validação das especificações (5 meses)
Macro 4 – Testes operacionais do conjunto (5 meses)
Macro 5 – Transferência de tecnologia (6 meses)
No decorrer do projeto serão construídos 4 protótipos em escala real, a saber
- Protótipo Elétrico 1 (PE1) – Plataforma puramente elétrica cujo objetivo principal é a medição de parâmetros de voo (ex. potências e correntes elétricas), que irão alimentar o dimensionamento do sistema propulsivo do protótipo final.
- Protótipo Híbrido 1 (PH1) – Mesma plataforma do PE1, só que com o powertrain híbrido, garantindo alguns testes de integração
- Protótipo Elétrico 2 (P2) – Plataforma nova, com a geometria do produto final, porém com o powertrain puramente elétrico.
- Protótipo Híbrido 2 (PH2) – Protótipo final.
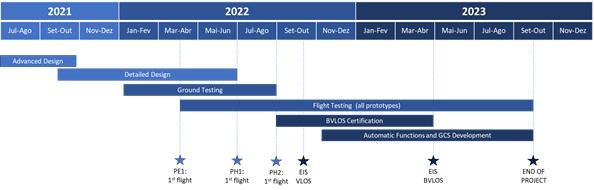
De forma complementar ao planejamento por macroentregas, foi realizado um cronograma contemplando as principais fases do projeto e seus principais marcos, conforme figura 6.
Resultados até o momento e Status do Projeto
A Macro 1 foi concluída no prazo (outubro/2021) onde foram atingidos os resultados esperados para esta etapa dentre os quais se destacam:
- Uniformização do conhecimento básico
- Seleção e contratação dos alunos bolsistas
- Especificação, adaptação e montagem do laboratório do projeto
- Desenho inicial do protótipo
- Especificação preliminar das arquiteturas elétricas, computacional e de telecomunicações.
- Especificação da flight controller
- Especificação dos motores elétricos e rotores (hélices)
- Especificação dos componentes do Protótipo Elétrico 1 (PE1)
A Macro 2, a qual deve ser concluída em maio de 2022, já produziu os seguintes resultados:
- Arquitetura elétrica definida
- Arquitetura computacional definida.
- Dimensionamento preliminar do sistema propulsivo (baterias, motores elétricos, gerador, motor térmico e sistemas associados).
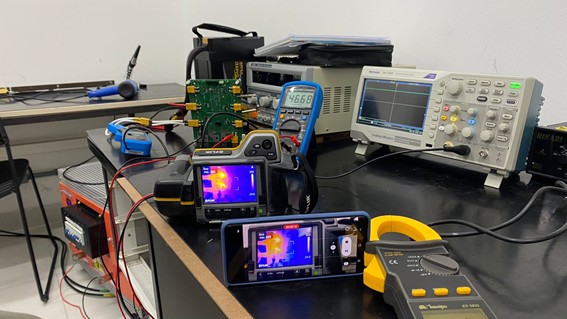
- Ensaio de laboratórios de alguns dos subsistemas como, por exemplo, as placas eletrônicas desenvolvidas ‘in house’.
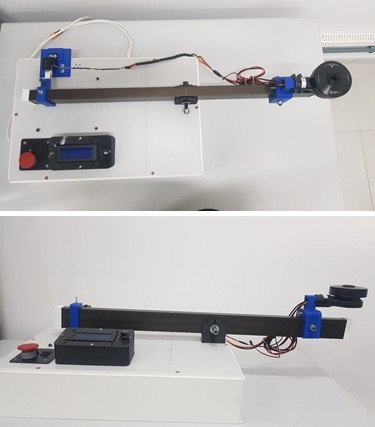
- Montagem do Protótipo Elétrico 1 conforme figura 7.
- Dimensionamento inicial do Protótipo Híbrido 1 (PH1).
- Desenvolvimento do Protótipo Elétrico 2 (P2) em andamento.
- Estudos iniciais do desenvolvimento do protótipo de serie ou PH2.


Durante todo o desenvolvimento do Projeto, os aspectos de manufatura são constantemente considerados de forma a otimizar a fabricação, maximizar o valor do produto, sua qualidade além da redução de custos.
Resultados Esperados
São esperados os seguintes resultados para as próximas etapas do Projeto:
- Primeiro voo do PE1, planejado para março de 2022.
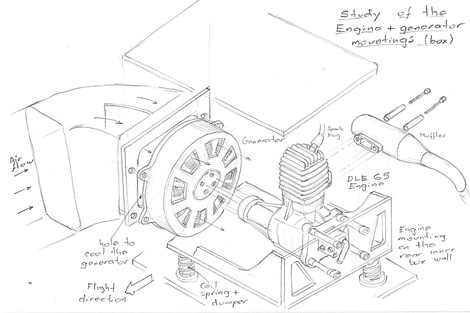
- Especificação, compras e ensaios do conjunto motopropulsor.
- Integração do motor a combustão e gerador (ensaios de bancada e em voo).
- Definição do layout de instalação na aeronave dos diversos sistemas, como por exemplo, placas eletroeletrônicas, placa controladora de voo (flight controller), antenas, computadores, etc.
- Identificação das regiões de maior aquecimento e aspectos de refrigeração.
- Ensaios estruturais do airframe.
- Estudos e modelamento de toda a integração dos sistemas e componentes do drone, tais como grupo motopropulsor, tanques de combustível, airframe, carenagens com suas respectivas otimizações de forma aerodinâmica.
- Estudos de trem de pouso: geometria e componentes; simulação e ensaios.
- Primeiro voo do Protótipo Híbrido 1, planejado para junho de 2022.
- Primeiro voo do Protótipo Híbrido 2, planejado para agosto de 2022.
- Entrada em Serviço VLOS, planejado para setembro 2022.
- Ensaios de certificação BVLOS
- Certificação BVLOS, planejada para abril de 2022.
- Projeto da Ground Control Station (GCS), ou estação de controle de solo.
- Projeto de funções para serviços de inspeção “autônomas”.
No presente artigo foi apresentado o projeto do RPAS Sharp Eye, realizado através de uma parceria da GLOBAL DRONES com o Instituto Federal de Santa Catarina (IFSC) campus Florianópolis e com a Empresa Brasileira de Pesquisa e Inovação Industrial (EMBRAPII).
Este projeto promete revolucionar o mercado nacional de inspeção de infraestruturas críticas, tais como linhas de transmissão de energia, oleodutos, gasodutos, dentre outras.
Além do mercado nacional a GLOBAL DRONES já estuda a inserção do Sharp Eye no mercado internacional, uma vez que já se aproxima de empresas de inspeção na Europa e América Latina.
O Sharp Eye é o primeiro de uma série de drones que a GLOBAL DRONES pretende desenvolver, dada a sua vocação de inovação no desenvolvimento de RPAS.
Referências
- Apresentação GLOBAL DRONES MundoGEO: https://mundogeo.com/2021/11/30/apresentando-a-global-drones/
- Site GLOBAL DRONES: www.globaldrones.com.br
- Vídeo Institucional GLOBAL DRONES: https://www.youtube.com/watch?v=szXWh3jdMWo
- Requisito RBAC_E 94 EMD 01: https://www.anac.gov.br/assuntos/legislacao/legislacao-1/rbha-e-rbac/rbac/rbac-e-94/@@display-file/arquivo_norma/RBACE94EMD01.pdf
- MANUAL DE OPERAÇÕES DO POLO DE INOVAÇÃO EM SISTEMAS INTELIGENTES DE ENERGIA – Metodologia EMBRAPII. https://www.ifsc.edu.br/documents/1736677/0/Manual+de+Opera%C3%A7%C3%B5es+-+PE-IFSC.pdf/4b7d022a-9013-4c0e-b7cb-a836d4a1a4e3
Mais informações:
www.globaldrones.com.br
contato@globaldrones.com.br
+55 48 3031-8667